特集
インフォメーション

自動運転車は、一般的に高精度3DマップとLIDARなどのセンサーを組み合わせて実装していますが、マサチューセッツ工科大学(MIT)がGPSとセンサーのみで走行する新技術を発表しました。高精度3Dマップが利用できない田舎道でもナビゲーションを行なうことができます。
MITの情報科学と人工知能研究室(CSAIL)は、高精度3Dマップなしでも走行する自動運転技術を公開しました。「MapLite」は、Google マップからでも入手できるGPSデータと、いくつかのセンサーを組み合わせるだけで、安定した自動運転を実現しています。
米マサシューセッツ州デベンスの田舎道での実験動画では、100フィート(約30.5メートル)先の道まで確実に検出している様子を確認することができます。研究はトヨタリサーチインスティテュートと共同で行なわれており、トヨタプリウスに、光を用いたリモートセンシング技術のひとつであるLIDARと、慣性計測装置(IMU)が積まれています。
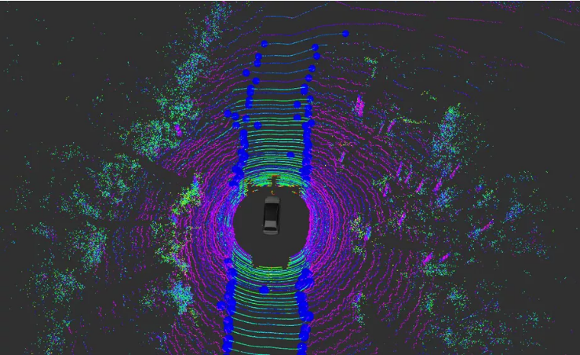
LIDARで3D点群データを生成し、道路の縁が予測されます。紫の線が最初の経路予測で、緑の線はより正確な予測を表しています。
Source:MIT News via The Verge
(lexi)
